杭州云乐车辆技术有限公司 线控底盘|智能网联车|无人小车|ros小车
13148456880

2024-09-21 04:03:46
在ROS中,TF库是一个用于执行坐标变换的强大工具,用于处理机器人系统中不同坐标系之间的数据转换。首先,你需要在ROS节点中引入TF库,然后创建一个TF听取对象。接着,通过听取对象,你可以执行坐标变换,将数据从一个坐标系转换到另一个坐标系。你需要指定目标坐标系和源坐标系,并提供时间信息以确保数据在正确的时刻进行变换。一旦完成坐标变换,你可以使用变换后的数据来执行机器人系统中的各种任务,如感知、控制、导航等。TF库提供了一个灵活且高效的方式来管理坐标变换,使得在复杂机器人系统中实现坐标变换变得更加容易和可靠。无论是进行视觉SLAM、运动规划还是传感器融合,TF库都是ROS中不可或缺的组成部分防控和无人小车,ros系统之间的应用。河北阿克曼ros哪家便宜

要在Linux上安装ROS,首先选择适合您的ROS版本(ROS1或ROS2)和Linux发行版(通常使用Ubuntu)。然后配置计算机以接受ROS软件包,通过终端运行适当的安装命令(对于ROS1通常是sudo apt-get install ros-<distro>-desktop,对于ROS2通常是sudo apt-get install ros-<distro>-desktop,将<distro>替换为您选择的版本名称)。接下来,初始化ROS环境变量,可以通过运行source /opt/ros/<distro>/setup.bash来实现,将<distro>替换为您的ROS版本名称。为了使这个变化长久生效,可以将上述命令添加到您的.bashrc文件中。,您可以使用roscore命令启动ROS主要,并开始使用ROS来进行机器人开发和编程。请注意,ROS的具体版本和您所使用的Linux发行版可能会影响安装步骤,因此建议查阅ROS官方文档以获取详细的安装说明。河北阿克曼ros哪家便宜ROS系统无人小车如何使用?

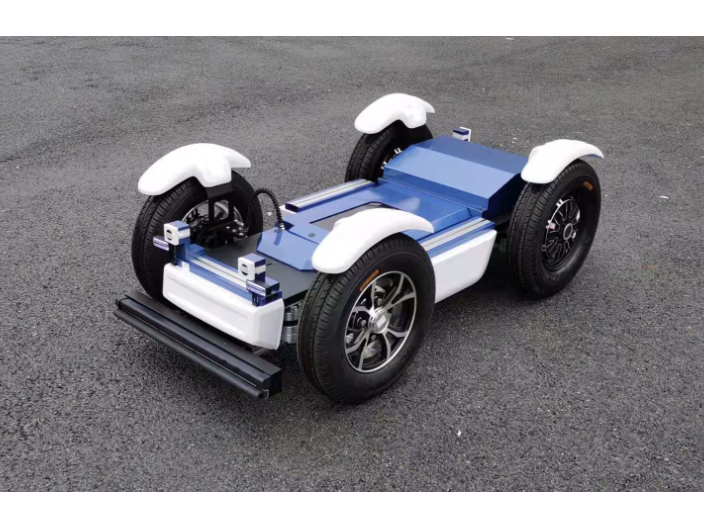
云乐线控底盘|无人驾驶教育领域科研应用亮点。云乐智能车的线控底盘一直深受无人驾驶教育领域的客户们欢迎,小编整理了一下云乐智能线控底盘在科研项目领域的应用亮点,供大家参考!希望云乐智能车可以更深入地支持无人驾驶教育,推动行业快速发展!首先就是有六个规格尺寸可供选择,小型、中型、中大型均有。搭配无人驾驶套件,可满足不同场景需求。再者就是每款底盘规范接口+开放CAN协议+技术支持,提供智能驾驶套件和云计算服务,出厂前13项性能测试和耐久试验,提供场景试验成功案例和试验场+提供场景应用成功案例。其次提供场景三维重建、仿真平台构建、云平台构建的支持,提供实验成果展示、演示内容支持,欢迎您前来咨询,为您提供专业的无人驾驶技术解决方案。
要使用ROS构建机器人导航系统,首先需要创建一个ROS工作空间并安装导航相关的软件包(如move_base、amcl、gmapping等)。然后,配置机器人模型和传感器,包括激光雷达、里程计、IMU等,以获取环境信息。接着,创建一个导航栈,将move_base节点与传感器数据集成,实现路径规划、局部避障和全局导航。配置导航参数,如地图、目标点、速度限制等,以满足具体任务需求。运行导航节点,将目标发送给move_base,它将使用全局规划器(如Navfn或A*)计算全局路径,然后使用局部规划器(如DWA或Teb)在局部环境中执行运动控制,实现机器人的自主导航。使用ROS工具来可视化导航状态和地图,如rviz和map_server,以便监控机器人的运动和建立地图。通过这些步骤,你可以构建一个强大的机器人导航系统,使机器人能够在未知环境中自主移动、避障和达到目标,适用于各种应用,包括自动巡航车辆、服务机器人和无人飞行器。这个导航系统的主要点是ROS的导航栈,它提供了丰富的导航功能和参数配置选项,可根据不同需求进行定制和扩展。Ros系统无人车哪家好?

要实现差分驱动底盘的简单导航,以便机器人能够避障和自主移动,首先需要确保底盘硬件与ROS兼容,连接里程计传感器以提供位置和速度反馈。然后,使用ROS Navigation Stack,配置导航功能的关键组件,包括局部和全局路径规划器、定位系统(如AMCL)和避障模块。通过ROS话题通信,将传感器数据传输到导航堆栈,使机器人能够感知周围环境。使用全局路径规划器规划机器人从起始位置到目标位置的全局路径,局部路径规划器生成安全的局部运动轨迹。定位系统估计机器人在地图中的位置。使用ROS启动文件(launch file)来启动导航堆栈,监视和调试其性能,确保机器人能够自主导航、避免碰撞并按照预期移动。这样,您可以实现差分驱动底盘的简单导航,使机器人能够在未知环境中自主移动、避开障碍物,适应各种导航任务。ROS(Robot Operating System)是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。河北阿克曼ros哪家便宜
ROS 通信接口正在成为机器人软件互操作的事实标准。河北阿克曼ros哪家便宜
首先是日益增长的服务机器人公司的需求。在接下来的十年里,我们将会看到首辆自动驾驶汽车成功上路。届时将会出现一批我们现在无法设想的机器人和应用程序。正如WillowGarage较早成员之一TullyFoote在2007年年末承诺的那样,在未来,“你将能够使用任何开源软件,只需结合你的商业模式做一些小小的改动,就能开启你的创业之旅”。ROS社区的发展将前所未有地使有创意的设计师和创业者们站在巨人的肩膀上。其次,工业市场上的应用也将越来越多。然而目前,对于ROS仍然有限的工作能力和是否应该放弃传统的成功商业模式,工业机器人制造商们仍持有一定理性的顾虑。不过,与此同时,ROS正在以相对简单的方式来灵活设计解决方案,以此拓展整个行业的边界。河北阿克曼ros哪家便宜