杭州云乐车辆技术有限公司 线控底盘|智能网联车|无人小车|ros小车
13148456880

2024-08-24 06:08:45
ROS系统的架构主要被设计和划分成三部分,没一部分都表示一个层级的概念:文件系统级(FileSystemLevel)计算图级(ComputaionGraphLevell)开源社区级(CommunityLevel)首级是文件系统级。你将会使用这一组概念来理解ROS的内部构成,文件夹结构,以及工作所需要的中心文件。第二级是计算图级,体现的是进程和系统之间的通信。你将会看到ROS各个概念和功能,包括建立系统,处理各类进程,与多台计算机通信等。第三级是开源社区级。这个层级是非常重要的,因为开源社区的大力支持才使得ROS在快速的发展。Ros系统中ros1和ros2之间的区别是什么?湖北便捷式ros商家

将传感器数据集成到ROS中通常涉及以下步骤:首先,获取传感器数据,可以使用传感器驱动程序、硬件接口或仿真环境。接着,将传感器数据发布到ROS话题或ROS消息中,使用ROS提供的通信机制(如rospy.Publisher)将数据发送给其他ROS节点。在接收端,你可以创建一个ROS节点来订阅这些话题,以获取传感器数据并进行后续处理,如感知、导航、控制等。确保你的传感器数据与ROS消息类型兼容,或编写ROS消息适配器以进行数据格式转换。这样,你可以轻松地将各种传感器(如激光雷达、相机、GPS、IMU等)的数据集成到ROS中,为机器人应用提供丰富的感知信息,以实现各种机器人任务和功能。这种集成方法使机器人能够感知和理解其环境,从而支持自主导航、目标追踪、避障等复杂任务。湖北便捷式ros商家Ros系统无人车多少钱?

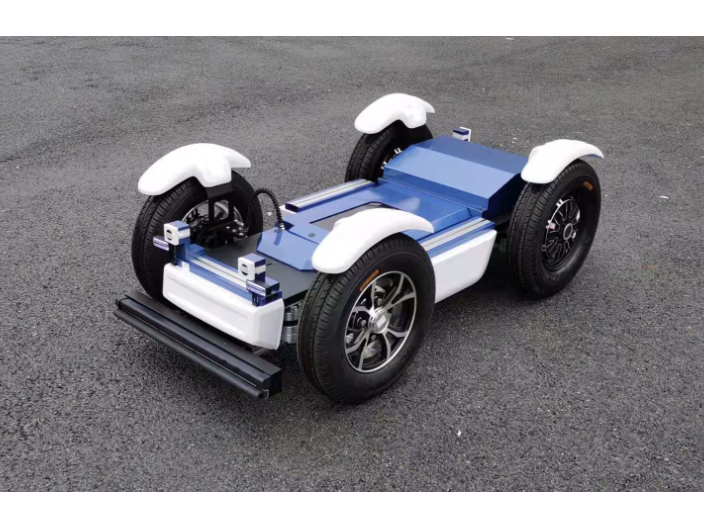
在ROS中,有一些现成的底盘控制器库,适用于不同类型的线控底盘,但通常需要一些定制和配置以适应特定底盘的要求。ROS控制库(如ros_control)提供了一个通用的框架,可以用于创建不同类型底盘的控制器,包括差分驱动、全向轮和阿克曼转向底盘等。这些库包括基本的控制器,如关节控制器和速度控制器,可以用于底盘的速度和方向控制。但由于不同线控底盘的硬件和控制需求差异较大,因此通常需要自定义和配置控制器,以确保其与特定底盘兼容并实现所需的运动控制。ROS的灵活性允许开发人员创建适应各种线控底盘的控制器,从而满足不同机器人项目的需求。此外,ROS社区中通常会有用户共享他们针对特定底盘开发的控制器,可供其他开发人员参考和使用。
ROS提供了一种方便的开发框架,使机器人开发变得更加简单和高效。它包含了一系列功能强大的软件包,涵盖了从底层硬件控制到高级感知与决策的各个方面。其中一些重点功能包括:
1.通信:ROS使用消息传递机制实现模块之间的通信。开发人员可以定义自己的消息格式,然后通过发布和订阅这些消息来实现模块之间的数据交换。
2.硬件抽象层:ROS提供了对不同硬件设备(如传感器、执行器等)的抽象接口,使开发人员可以方便地操作和控制硬件。
3.常用功能包:ROS包括各种功能包,涵盖了机器人导航、目标识别、SLAM(同时定位与地图构建)、路径规划等常见任务。这些功能包可以帮助开发人员快速搭建机器人应用程序。
4.仿真支持:ROS提供了强大的仿真工具,例如Gazebo,可以帮助开发人员在虚拟环境中测试和验证他们的机器人系统。 ROS已经被广泛应用于各种机器人领域,包括工业机器人、服务机器人和无人机等。

ROS提供了一系列SLAM(Simultaneous Localization and Mapping)算法和工具,用于创建底盘的地图和定位。ROS Navigation Stack中包括一些常用的SLAM算法,如GMapping和Cartographer,可以通过传感器数据(如激光雷达或RGB-D相机)来构建环境地图并同时估计机器人的位置。此外,ROS还支持多种传感器和硬件平台,使用户能够选择适合其项目的SLAM解决方案。通过使用这些ROS SLAM工具和算法,开发人员可以实现底盘的精确定位和地图构建,使机器人能够在未知环境中自主导航和避障,适应各种机器人应用。ROS(机器人操作系统)是一个开源的软件框架,用于构建机器人应用程序。贵州麦克纳姆轮ros厂家直销
ROS 通信接口正在成为机器人软件互操作的事实标准。湖北便捷式ros商家
工作空间是一个包含功能包、编译包和编译后可执行文件的文件夹,用户可以根据自己的需要创建多个工作空间,在每个工作空间中开发不同用途的功能包。ROS的发展依赖于开源和共享的软件,这些代码由不同的机构共享和发布,比如GitHub源码共享、Ubuntu软件仓库发布、第三方库等。ROS的官方wiki是重要的文档讨论社区,在里面可以很方便地发布与修改相应的文档页面。ROS的answer主页里有大量ROS开发者的提问和回答,对ROS开发中遇到的各种问题的讨论很活跃。湖北便捷式ros商家